
Activité 2-2
Introduction :
Afin de remplir les bons flacons, le système dispose d'un codeur incrémental, constitué d'un disque comprenant 24 encoches dont une plus grande afin de repérer le flacon N°1 comme on peut l'observer sur le système CALYPSO (version antérieure de l'échantillonneur).
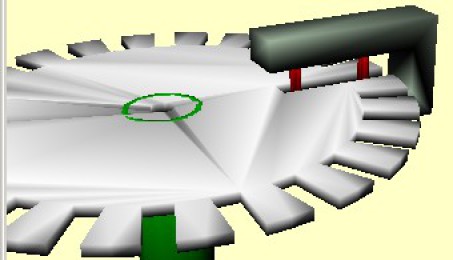 xian-grafcet2 | Capteur à fourche comprenant deux faisceaux infrarouges. Le faisceau A permet d'obtenir le signal A : A=1 si le faisceau n'est pas coupé, donc lorsque le tuyau est au-dessus d'un des 24 flacons. Le faisceau TOP permet d'obtenir le signal TOP : Si TOP = 1 : le tuyau est au-dessus du flacon n°1. |
Afin de mieux en comprendre le fonctionnement, nous allons utiliser une maquette virtuelle fonctionnant sous AUTOMGEN associée à deux pupitres : l'un de fonctionnement et l'autre de visualisation.
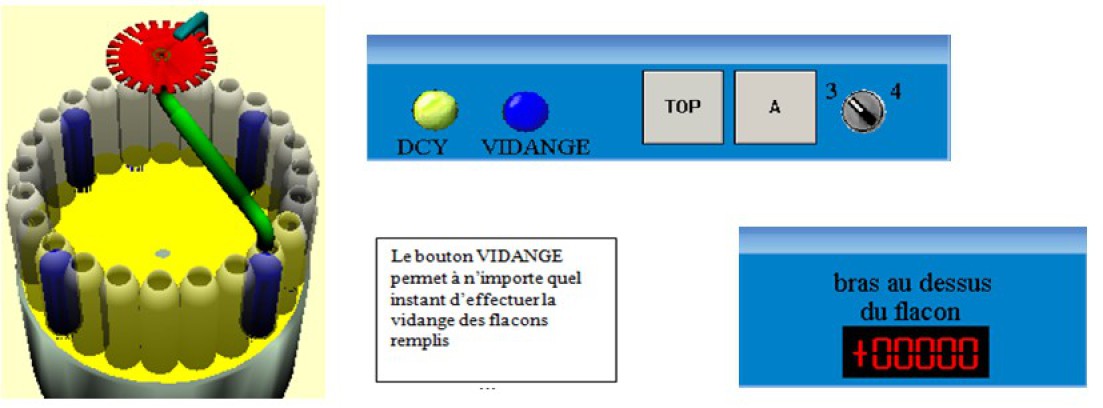
Pour programmer le système nous utiliserons un compteur, qui sera initialisé à 1, lorsque le tuyau sera au-dessus du flacon n°1. Ce compteur sera incrémenté à chaque fois que le tuyau arrivera au-dessus d'un flacon, il indiquera donc la position du tuyau.
Pour la suite, nous nous contenterons dans un premier temps, que du choix entre 3 ou 4 flacons à prélever.
Activité :
A partir du grafcet existant (fichier xian1) et de la partie opérative virtuelle, on veut simuler le comportement initial du système. On donne les flacons remplis pour 3 échantillons. Le premier flacon à être rempli est toujours le n°1 !
Compléter le grafcet d'un point de vue partie commande (voir document réponse n°1).
Entrées : A, TOP, dcy, Choix4
Sorties : MOTEUR ON, REMPLIR
Compteur : CPT
Mettre en œuvre la simulation afin de faire apparaître les deux choix possibles.
Constater quels sont les flacons qui sont remplis puis colorier en bleu les flacons remplis pour 4 échantillons et indiquer le n° à côté (voir document réponse n°1).
Conclure, le grafcet est-il représentatif du fonctionnement réel ?




